Der erste Teil dieser Reihe zeigte bereits den Lehrgang, die Einsatzgebiete und die Perspektiven des Elektrotechnikermeisters Systemelektronik. In diesem Teil möchte ich Beispiele aus den Fächern Mess- und Regelungstechnik, Microcontroller und Automatisierungstechnik aufzeigen.
Unterrichtsfach Mess- und Regelungstechnik
Auslegung von Reglern
Zur Auslegung von Reglern müssen die Eigenschaften und Verhaltensweisen von Regelstrecken begutachtet werden. Diese werden durch Testfunktionen ermittelt, die Parameter für das dynamische (zeitliche) und statische Verhalten liefern sowie Aussagen über die Eigenschaften einer Regelstrecke bzw. eines Regelkreisgliedes zulassen. Mithilfe der Testfunktionen werden Regelstrecken messtechnisch untersucht, indem bei der bestehenden technischen Einrichtung die Testfunktion als Eingangsgröße die Regelstrecke anregt und der Verlauf der Ausgangsgröße gemessen wird.
Sprungfunktion und Sprungantwort

Die Sprungfunktion ist die häufigste Testmethode in der Regelungstechnik und liefert, auf die Regelstrecke angewendet, direkte Kriterien zur Reglerauslegung und Parameter-Dimensionierung eines Reglers (Bild 3). Die Sprungantwort entspricht dem zeitlichen Übergangsverhalten eines Regelkreisgliedes und macht Aussagen über dessen dynamische (z. B. Zeitkonstante) und statische Eigenschaften (Endwert). Die prinzipielle Sprungantwort wird in das Blockschaltbild eines Regelkreisgliedes eingetragen. Zusammen mit den Parametern für das dynamische und statische Verhalten ist damit dessen systemspezifisches Verhalten im Sinne der Regelungstechnik vollständig beschrieben.
Einstellregeln

Aus der oben angeführten Methode zur Bestimmung der Regelstreckeneigenschaften sind eine Reihe von Näherungsverfahren entwickelt worden, mit denen sich anhand bekannter Streckenparameter – wie kS (Verstärkungsfaktor der Strecke), TU (Verzugszeit) und Tg (Ausgleichszeit) einer PTN-Regelstrecke – entsprechende Reglerparameter berechnen lassen. Unter anderem haben die Physiker Chien, Hrones und Reswick Einstellregeln für die Berechnung von PID-Reglern entwickelt (Tabelle 1).
Diese Reglerparameter sind als eine erste Reglervoreinstellung aufzufassen. Eine Optimierung des Regelkreises muss nach der Inbetriebnahme erfolgen.

Zur Veranschaulichung ein Beispiel: Es wird eine Sprungantwort einer Regelstrecke aufgenommen. Das Stellglied am Eingang der Regelstrecke wird durch einen sprunghaften Spannungsanstieg (∆U = 1 V) angeregt. Die Antwort des Streckenausgangs (Istwert) wird daraufhin mitgeschrieben und ausgewertet (Bild 4):
- T1 = 2,89446 s, T2 = 29,86677s, ΔT = 26,97231 s
Wie aus der Messung abzulesen ist, beträgt Tu = 2,89 s und Tg = 26,97 s. Die Berechnung des Verstärkungsfaktors der Strecke ergibt »1«, da sowohl die Änderung am Ausgang und am Eingang der Strecke 1 V beträgt:

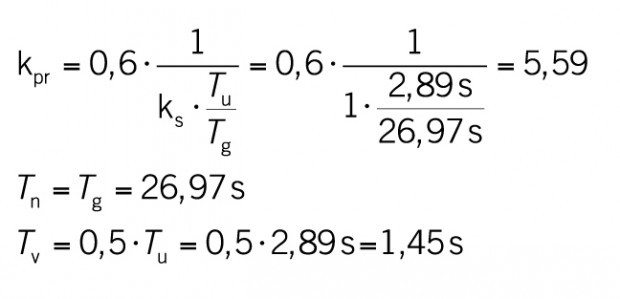
Soll nun ein PID-Regler mit aperiodischem Verhalten (unkritisch) und gutem Führungsverhalten eingesetzt werden, ergeben sich folgende PID-Einstellwerte:
Mit den Werten kpr = 5,59 (P-Anteil), Tn = 26,97s (Nachstellzeit, I-Anteil) und Tv = 1,45 s (Vorhaltezeit, D-Anteil) wird der Regler eingestellt. Diese sind als Startwerte anzusehen und können nun optimiert werden.
Unterrichtsfach Microcontroller

»Grundlagen der Elektronik und Microcontroller« heißt ein weiteres Unterrichtsfach innerhalb der Ausbildung zum Meister Systemelektronik. Hier werden anhand des NIBObee-Roboters mehrere Unterrichtsfächer sowohl in der Theorie als auch in der Praxis vereint. Zum einen sind es Grundlagen zu den verwendeten elektronischen Bauteilen, zum anderen die Programmierung des ATmega 16 Microcontrollers in C++.
Während der Konstruktion eines NIBObee-Bausatzes (Bild 5) besprechen die Meisterschüler die Bauteile – etwa Widerstände, Kondensatoren, Spulen, Dioden, Transistoren, Infrarotsensoren, Inkrementaldrehgeber sowie die denkende Einheit ATmega 16.
Der NIBObee wird in C++ programmiert und hat verschiedene Sensoren zur Wahrnehmung seiner Umgebung. Er verfügt über eine integrierte USB-Schnittstelle, die als Programmier- und Ladeschnittstelle dient. Als Aktoren werden zwei Motoren mit Getriebe eingesetzt, die die Räder des NIBObee getrennt antreiben. Während des Zusammenbaus sind handwerkliche Fähigkeiten gefragt, denn das Löten von kleinen Bauteilen fordert höchste Konzentration. Nach Messung und eventueller Fehlersuche gibt es eine Einführung in die Programmiersprache C++. Sodann können die Teilnehmer mit der eigenen Programmierung beginnen und mit Sensoren und Aktoren ein Programm zur Steuerung des NIBObee erstellen, das zum Beispiel zur Hinderniserkennung und zum Ausweichen genutzt wird.
Unterrichtsfach Automatisierungstechnik
Ablaufsteuerungen (Schrittketten)

Die meisten zu steuernden Prozesse erfordern einen Ablauf, der einer bestimmten zeitlichen Reihenfolge unterliegt. Eine Ablaufkette besteht aus einer Folge von Schritten, die abhängig von den Bedingungen zum Weiterschalten (Transitionen) in einer festgelegten Reihenfolge aktiviert werden (Bild 6). So darf eine Aktion wie etwa ein Bewegungsvorgang erst dann eingeleitet werden, wenn eine andere beendet ist.
Bei der Verknüpfungssteuerung wird dieses Problem gelöst, indem man entsprechende Verriegelungsbedingungen im Programm mit einbaut. Dabei zeigt sich indes, dass sich ab einem gewissen Steuerungsumfang die Lösung in Verknüpfungssteuerungen als unübersichtlich und bei der Fehlersuche als zu zeitintensiv gestaltet. Werden solche Prozesse hingegen als Ablaufsteuerung realisiert, wird eine klare Struktur erkennbar, die ein Abbild des zu steuernden Prozesses wiedergibt.
Zur Darstellung von Ablaufsteuerungen eignet sich am besten der Funktionsplan. Er ist eine problemorientierte Darstellung der Funktion einer Steuerung, unabhängig von deren Ausführung und Typ. Der Funktionsplan ergänzt die verbale Funktionsbeschreibung. Mit ihm werden technologisch und betrieblich notwendige Anforderungen übersichtlich, sprachlich verständlich und vor allem eindeutig dargestellt. Somit ist er bestens als Verständigungsmittel zwischen Hersteller und Anwender geeignet und unterstützt den Projektverlauf bei der Projektierung, Fertigung, Inbetriebnahme, Störungssuche und Wartung von Steuerungen. In der DIN EN 60848 unter dem Begriff GRAFCET sowie in der SPS-Norm DIN EN 61131-3 sind Grundlagen für die Ablaufketten-Darstellung beschrieben.
Eigenschaften einer Ablaufkette
Bei einer Ablaufsteuerung folgt ein Schritt auf den nächsten. Schaltungstechnisch sind die Schritte so verriegelt, dass die Schritte Befehle ausgeben (Aktionen). Für Schrittketten gibt es Regeln und Wirkungsweisen:
- die Schritte der Steuerung entsprechen meist den technologisch bedingt aufeinander folgenden Schritten der zu steuernden Anlage
- die einzelnen Schritte werden zu einer genannten Ablaufkette zusammengefasst
- innerhalb einer linearen Ablaufkette ist immer nur ein Schritt aktiv
- die kleinste funktionelle Einheit des Programms einer Ablaufsteuerung wird als Ablaufschritt (oder kurz Schritt) bezeichnet
- die Wirkung der Aktionen wird abgefragt und auf den nachfolgenden Schritt als Fortschaltbedingung/Transition geschaltet
- das Auslösen einer Transition bewirkt die Aktivierung des unmittelbar nachfolgenden Schrittes sowie das Löschen des vorhergehenden Schrittes
- Ausgangspunkt ist immer ein gesetzter (aktiver) Startschritt
- das Ende der Kette führt wieder auf den Startschritt.

Im Folgenden gehe ich auf die GRAFCET-Norm ein.
Bei den Transitionen lässt die DIN EN 60848 nur einen booleschen Formelausdruck zu, zum Beispiel: Bohrwerk oben * Bohrwerk aus * Startbefehl. Das Zeichen »*« steht dabei für eine UND-, das Zeichen »+« für eine ODER-Verknüpfung. Die am häufigsten benutzten Aktionen sind der nicht gespeicherte Befehl und der Befehl »vorrangig Setzen« bzw. »vorrangig Rücksetzen«. Auf diese Aktionen möchte ich nun eingehen.
Nicht gespeicherter Befehl

Die Aktionen mit dem Verhalten »N« (»Nicht gespeichert«) entsprechen dem mit einer roten Strichlinie eingekreisten Schritt aus Bild 6. Der N-Befehl steht nur solange an, wie der zugehörige Schritt aktiv ist. Wird auf den nachfolgenden Schritt weitergeschaltet, so wird der N-Befehl nicht mehr ausgegeben.
Im nachfolgenden Beispiel (Bild 7) werden die Signale »Automatik Freigabe« (AF) und »Hand Freigabe« (HF) im Betriebsartenteil gebildet. Das Signal »Automatik Befehl« (AB) ist ein Schrittmerkersignal aus dem Bereich Automatik und das Signal »Handbefehl« (HB) wirkt aus dem Bedienfeld auf die Verknüpfungen der Einzelsteuerebene, hier auf einen nicht speichernden Befehl. Weiter sind eine Freigabe und eine Schutzverriegelung dargestellt, die in jeder Betriebsart wirksam sein sollen.
Setz-Befehl / Rücksetz-Befehl

Die Aktion mit dem Verhalten »S« (»gespeicherter Befehl«) und die Aktion mit dem Verhalten »R« (»gespeicherter Befehl rücksetzen«) gehören logisch zusammen. Sie werden wie in Bild 8 zu sehen dargestellt. Der »gespeicherte Befehl« wird in einem Schritt gesetzt und bleibt es auch dann, wenn der Schritt nicht mehr aktiv ist. Der »gespeicherte Befehl« muss deshalb in einem anderen Schritt durch einen Gegenbefehl R wieder gelöscht werden. GRAFCET macht die Angabe des exakten Zeitpunks erforderlich. Hier: ansteigende Flanke (Aktivierung) des Schrittes 2. Der Bohrmotor wird dabei eingeschaltet. Zum Ausschalten wird an anderer Stelle der Wert 0 zugewiesen (Bild 9).
Ausblick
So weit zu den detaillierten Einblicken in den Unterricht der Ausbildung zum Elektrotechnikermeister mit der Fachrichtung Systemelektronik. Im abschließenden dritten Teil dieser Reihe zeige und löse ich einen Teil der letzten praktischen Prüfung für die angehenden Meister.
Sollte es Probleme mit dem Download geben oder sollten Links nicht funktionieren, wenden Sie sich bitte an kontakt@elektro.net




{kind=link}
{kind=link}